研究紹介

CFRP複合圧力容器の破裂圧力を予測する技術の開発研究を行っています。

多様な移動方法を実現できる生物のトカゲを模範としたロボットです。

ひし形リンク構造を用いた免震装置で、構造物の自重を支持した状態で免震効果が実現できています。

脳血管内の血流をシミュレーションしたものです。血管のこぶである脳動脈瘤の成長・破裂予測に貢献するとともに、治療計画の策定に役立てようとしています。
クローラ機構と脚機構を切替え、環境ごとに変形して移動が可能な4足歩行ロボットです。クローラ機構単体では踏破不可能な段差を後脚の補助により登っています。

大規模系列計算による小動脈内を流れる赤血球挙動のシミュレーションです。実験では観察することのできない血管内部の赤血球運動を可視化しました。
この磁気浮上搬送車はレールとの間が非接触であるため、「摩擦・摩耗がない」「粉塵を発しない」「潤滑を必要としない」スムーズな搬送が可能です。
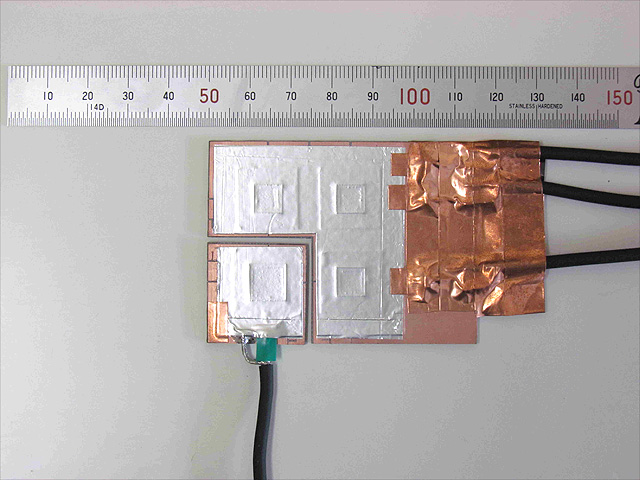
広く使用されているエレクトレットコンデンサマイクロフォンの原理を利用し、フィルムを積層することで大幅にギャップ中の電界強度を高め、その結果耐圧と周波数帯域を向上させたフィルム積層エレクトレット音響センサ(FilmECS)の開発を行っています。